EN


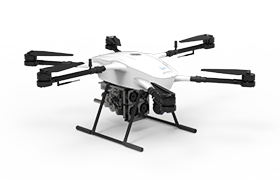
多旋翼無人機是一種具備垂直升降,懸停等靈活飛行性能優勢的無人飛行器,因此在某些環境下比固定翼無人機具有更好的適用性。多旋翼無人機通過上下共軸放置的三組共六個電機提供升力,通過改變旋翼轉速來調整姿態,通過調整姿態進一步實現位置控制,具有懸停性能優異、移動靈活、機械結構緊湊、零部件可靠性高等優點。

多旋翼無人機是通過調節多個電機轉速來改變螺旋槳轉速,實現升力的變化,進而達到飛行姿態控制的目的。 一般分為四個方向的運動,分別為:升降、俯仰、前后和偏航。

1、升降運動
在圖a中,同時增大無人機四個旋翼轉速,使得總升力大于無人機整體重量后無人機將沿著Z軸垂直上升,反之,減小四個旋翼轉速使總升力小于無人機自身重量后,無人機將垂直降落。在無外界干擾的情況下當總升力等于機體重量時無人機將保持懸停。
2、俯仰運動
多旋翼無人機任意兩對角線上的電機保持轉速不變,對角線兩側的電機形成差速,為了不因為旋翼轉速的改變引起多旋翼無人機整體扭矩及總拉力改變,對角線上的兩旋翼轉速變量的大小應相等。由于對角線一側的兩旋翼的升力上升,另一側的旋翼的升力下降,產生的不平衡力矩使機身繞對角線旋轉實現多旋翼無人機的俯仰運動。
3、前后運動
前后運動飛行原理:如圖b所示,3、4號旋翼轉速增大,1、2號旋翼轉速保持,前后升力差會導致無人機出現“前低后高”的姿態,旋翼推力在X軸正方向的分力將驅動無人機前進;同理當1、2號旋翼轉速增大,3、4號旋翼轉速不變時無人機將會后退。
4、偏航運動
如圖d所示,當一對正轉旋翼與一對反轉旋翼轉速相同時,產生的扭矩則相互抵消,無人機不旋轉。和當1、3號旋翼轉速增大而2、4號旋翼轉速不變時,1、3號旋翼對機體產生的扭矩大于2、4號旋翼的反扭矩,因此無人機將繞Z軸進行逆時針旋轉;反之,當2、4號旋翼轉速大于1、3號旋翼轉速時,無人機將繞Z軸順時針旋轉。